1. 功能要求
(1)机器人能够快速移动;
(2)实现远程“攻击”,发射炮弹击中目标物体;
(3)走位、定位灵活,实现快速定点以及定发射方位;
(4)具有炮弹储存装置,实现一定数量炮弹储存。
2. 设计方案
为实现预期效果,行走机构采用麦克纳姆轮,兼顾移动速度与灵活平移与转向。通过控制四个行走电机的转动方向控制麦克纳母轮的运动不同运动从而实现机器人本体前进、后退、平移与原地转弯。相比于传统的橡胶车轮具有极大的灵活性
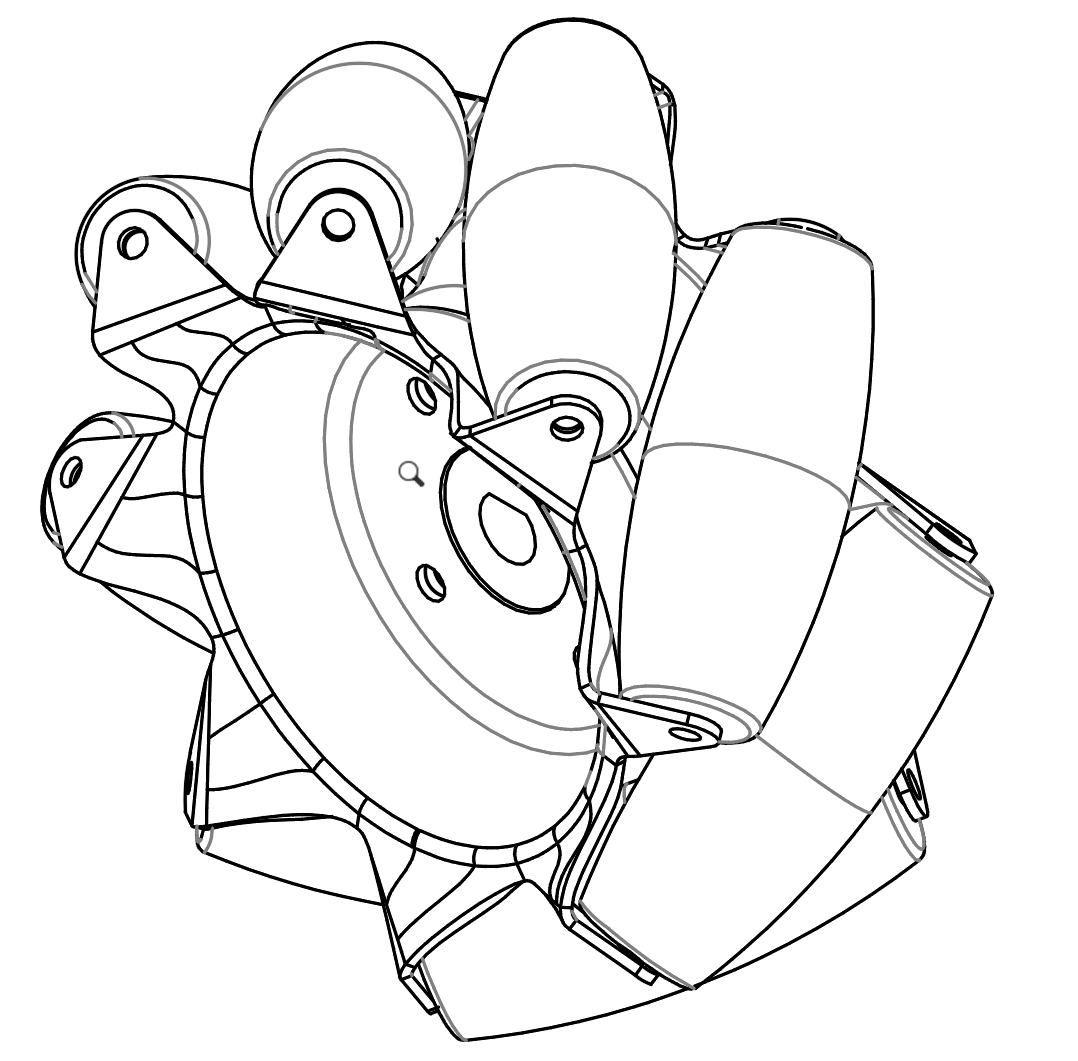
图1麦克纳母轮示意图
对于移动射击机器人的主体射击功能方案的设计,可以采用气缸弹射、杠杆抛投、摩擦轮加速式等实现炮弹的发射功能;本着尽量降低机器人控制复杂程度提高可靠性的原则,选择实现机械结构与控制系统尽可能简单的方案,对比常用的几种方案后最终拟采用摩擦轮式发射机构。机构原理如下图所示,主体采用两个由减速电机驱动的摩擦轮,摩擦轮旋转速度大小相等方向相反;摩擦轮之间的间隙略小于炮弹直径,在炮弹进入两个摩擦轮之间的空间时收到一定的挤压力,从而带动炮弹加速到与摩擦轮外围线速度相等,利用惯性飞射出去,从而实现对目标物的击打。

图2移动射击机器人炮弹发射机构简图
与发射机构相对应的供弹装置也具有相当重要的作用,既要保证具有一定的载弹量,同时机构的高度不能过大,导致机器人超出整体限高750mm设计要求。拟考虑类似于左轮手枪的转盘式供弹装置以及螺旋管道式供弹装置;转盘式供弹装置具有结构简单,制作要求较低的特点,缺点在于单次载弹数量较少,机器人需要频繁补充炮弹;而螺旋管道式供弹具有较大的载弹量,结构相对复杂。最终经权衡采用螺旋管道式载弹舱,复杂的螺旋结构通过3D打印的方式实现低成本的成型。
确定了行走方式、发射机构以及载弹结构后即确定了移动射击机器人的主体方案,即可开展后续设计实施。


 渝公网安备 50019002502335号
渝公网安备 50019002502335号