为能完整实现机器人对工作的所有需求,我们需要提前对机器人的电机、主控板等一系列关键原件进行选型和试用,以便机器人能达到预期的工作状态。机器人运动需要各个部位协调统一的进行,同时需要考虑成本问题,尽可能购买性价比更高的元器件。于是在保证相同质量及性能的前提下挑选电机及驱动模块等元器件。


图1 M3508减速电机 图2 57步进电机
机器人的行走驱动电机拟选择M3508减速电机,适用于全速度范围的有感无刷结构,功率密度极高但不适应低速、变速工况的无刷外转子电机M3508减速电机套装支持PWM,信号输入控制和CAN总线指令,CAN总线还可实时读取,电机转子位置等状态信息。使用RowboaterAssistant可对电机参数进行调整,让电机工,电机参数进行调整,让电机工作在最佳状态,配置定制FOC电调,可广泛应用于机器人移动平台力,驱动模块等机构,M3508最大功率220w,最大持续功率150w。
在价格相同的情况,为了保证机器人行动的万无一失,现在对两款不同类型的电机进行性能上的对比,如下表所示
表1电机性能对比
|
种类 |
M3508减速电机 |
57步进电机 |
|
额定电压 |
24V |
12V |
|
空载转速 |
482rpm |
300rpm |
|
环境温度 |
0-50°C |
0-40°C |
|
参数重量 |
365g |
1000g |
|
外径 |
42mm |
30mm |
|
总长度 |
98mm |
100mm |
M3508减速电机套装拥有业界领先的功率密度,在提供大功率的同时,体积和重量仅为同度,在提供大功率的同时,体积和重量仅为同等级设备的20%,节省大量空间,输出更多动力,让竞技机器人高效运转。
步进电机的电机功能参数不能完全满足一些工作要求的实现,如果非要使用也不是不可以,但是为了防止不必要的麻烦,我们选择M3508减速电机更合适。其体积不仅小巧,且具备强劲的动力,卓越的智能保护为高效能机器人提供强有力的保障。M3508减速电机,C620电调M3508减速电机由电机与减速器完美集成,配备拥有FOC控制技术的C620电调,能将功能发挥极致。电机将电能转化为动能,而电调则根据控制信号调节电机的转速,两者构成了动力系统,可广泛应用于机器人移动平台动力、驱动模块等机构。产品多重优势,动力强劲和体积小,所以作为我们电机的首选款。

图3 C620无刷电机调速器
支持两种可选控制方式
50-500Hz的PWM(脉宽调制)信号控制
CAN总线指令控制
最高支持20A的持续电流
支持对总线上的电调快速设置ID
支持通过CAN总线获取电机温度、转子位置和转子转速等信息,切换电机时可无需进行霍尔校准
M3508 减速电机套装参数
额定电压:24V
空载转速:482rpm
持续最大扭矩:3N²m
3N²m 下最大转速:469rpm
使用环境温度:0-50° C
M3508 直流无刷减速电机参数重量:365g外径:42mm总长度:98
输出轴:D 型带螺纹孔输出轴直径:10mm
C620 无刷电机调速器参数额定电压:24V
重量:35g
尺寸(长宽高,不含线):49.4*25.8*11.5mm带线总长度:344±15mm 信号类型:CAN 指令、PWM 最大持续电流:20A。
在价格等因素的综合考虑之下,选择两款主控板备选,其中最终选择其中一款。参数对比图如下
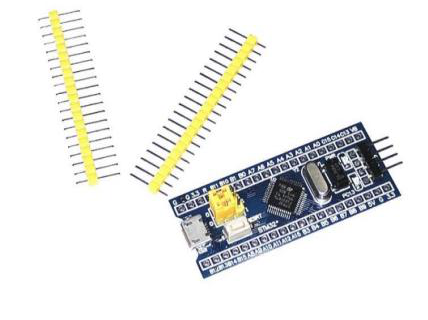
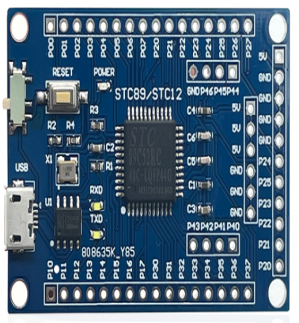
图4 STM32F103C8T6最小系统板 图5 51单片机最小系统板
表格2主控板性能对比
|
种类 |
51 |
STM32C8T6 |
|
内核 |
ARMCortex-M3,32Bit@72MHz,1.25DMIPS |
51Core,8Bit@2MHz Max(分频后),0.06DMIPS |
|
地址空间 |
64KB |
4GB |
|
片上存储器 |
ROM只有2K-64K,RAM仅为128B-1K |
ROM为20K-1MB,RAM有8K-256K |
|
存储器结构 |
冯诺依曼结构 |
哈弗结构 |
|
外设 |
仅有三个定时器和一个串口 |
拥有AD,DA,Timer,WWDG,IWDG,CRC,DMA,IIC,SPI,USART等众多外设 |
STM32是32位微控制器,51是8位的,所以从内核速度上来讲就快很多,32里面总线都是32位的,也就是一个机器指令可以对32位数据进行一次操作,STM32用的是ARMCortex-M系列内核,才用ARMv7/8指令集。
时钟方面,51一般就8M、16M的样子,32不同系列支持的频率不一样,H7系列可以做到480MHz,其内部时钟系统也相当强大,进行不同程度的分频后用于不同的片内外设。
片内外设方面,STM32外设更加丰富,功能更加强大,51只有两个定时器,两个外部中断,32有很多定时器(大部分是8个),每个定时器的功能都非常,有自带的pwm模式,输入捕获,编码器模式等等,可配置多达16个外部中断,STM32还支持硬件IC,SPIDMA,SDIO,以太网等外设,而51对11C,SPI这些只能用CPU指令控制1O高低电平来模拟,这样非常占CPU资源,不利于执行多任高实时性的控制任务。
虽然价格上,STM32比51要贵一点,但从综合能力方面来看STM32已经远远甩掉了51,所以我们才选择STM32
机器人运动过程中,需要满足使用,同时兼顾使用时间、价格等因素,考虑的编码器主要有两种。其性能对比如下表所示。


图6 EPC-755A编码器 图7 AS5047磁吸编码器
表6编码器性能对比
|
种类 |
EPC-755A编码器 |
磁吸编码器 |
|
输入电压 |
5~28VDC |
3.3/5V |
|
工作精度 |
≤±0.01° |
±0.2° |
|
使用时间 |
平均10万小时 |
43000小时左右 |
|
转速 |
7500 |
28000 |
EPC-755A是美国ENCODER PRODUCTS公司生产的微型光电编码器,具有重量轻、体积小、耐碰撞、易安装等优点,其直径和长度均为1.5英寸,采用能保证多年可靠工作的金属结构,具有多种灵活的安装方式,能大大降低安装成本。该光电编码器输出为双通道正交信号,具有校正基准信号,可方便地实现双向计数。
与磁吸编码器比较,PC-755A光电编码器具备良好的使用性能,在角度测量、位移测量时抗干扰能力很强,其转速虽然差了AS5407磁吸编码器一截,但是已经足够机器人使用,但其工作精度高于AS5407磁吸编码器,且还具有长达几年的寿命,远远的超出其他型号的编码器,还具有高精密度和易于安装的特点,非常适合用于机器人,因此,我们最终选择EPC-755A编码器。
下表为EPC-755A编码器完整参数:
|
指标 |
参数 |
|
输入电压 |
5~28VDC(最4.75V,最大28.0V) |
|
输出电流 |
最大100mA |
|
输出信号 |
2路计数脉冲,1路基准脉冲 |
|
基准信号 |
每圈输出1个脉冲,中心与通道A波形重合 |
|
测量范围 |
最大可测旋转速率为7500转/分 |
|
工作温度 |
最高可达100℃ |
|
频率响应 |
100kHz,最高200kHz |
|
分辨率 |
最低1个脉冲/圈,最高6000个脉冲/圈,中间有55种分辨率可选择 |
|
安装方式 |
柔性方式,伺服方式,法兰盘方式 |
|
使用寿命 |
平均10万小时 |
|
重量 |
柔性100克,伺服90克 |
|
转轴方向 |
双向 |
|
工作精度 |
两圈间误差≤±0.01° |
电磁阀原理上分为三大类:直动式、分步直动式、先导式。考虑到机器人动作的速捷性,在这里我们采用了直通式的电磁阀,其优于另外两种电磁阀在于结构简单,动作可靠,在零压差和微真空下正常工作。赛制规定气瓶的气压为0.8M大气压,所以电磁阀的膜片工作时就需要能长时间在此压力下工作,复杂型的膜片结构就无法满足气动结构的快速动作,于是我们选择了直动式的膜片结构,能在0.05s内快速使气动机构动作,在机器人使用过程中气缸量较少,所以选用3口二位就能满足需求且简化结构,同时我们只需要一个信号控制采用单控的方式能极大地降低错误率。在快速操作下,电磁阀的励磁时间需要尽可能的小,这款产品可在0.05s内完成励磁,可满足快速操作的需求。

图8 电磁阀实物图
机器人运动过程中,同时需要满足高稳定性以及高适应性,同时兼顾控制精度、价格等因素,考虑的气缸主要有两种。其性能对比如下表所示。


气缸MAL16X50 双联式气缸
图9 两种气缸对比图
表5气缸性能对比
|
种类 |
活塞式气缸 |
双联式气缸 |
|
缸径 |
16mm |
16mm |
|
最大行程 |
500mm |
200mm |
|
温度范围 |
-20~70摄氏度 |
-5~70摄氏度 |
|
动作方式 |
双作用 |
固定式缓冲 |
|
压力 |
0.1~1.0Mpa |
1.0Mpa |
本次选用的大气缸MAL16x50是笔形气缸,此气缸位于小车中部主要控制货叉叉臂的升降,对于挑起物体时平稳控制物体的上升。
与双轴气缸相比,具有结构紧凑,螺纹安装固定能有效节省安装空间的特点,还能够适应高频率的使用,以确保在赛场上时的可靠性和耐用性,且在具备实用性的同时还兼顾了外观,圆柱体形状的外观更加没关。
根据气缸压力公式分析:
F1=Pxπ/4x^2D
F2=Pxπ/4x^2D^2d
其中:F1无活塞杆端的最大理论输出力(N)
P-公称压力(Mps)D-气缸径(mm)d-活塞杆直径(mm)
气缸的工作温度为-20~70摄氏度,不仅适合低温工作,并且在常温下能工作较长的时间。
机器人运动过程中,同时需要满足高初速度以及高适应性,同时兼顾控制精度、价格等因素,考虑的气缸主要有两种。其性能对比如下表所示
对比双轴气缸,其直径只有双轴气缸的一半,直接节省了一半的空间,且MAL25x175的最大行程和温度适应范围都优于双轴气缸,除此之外,综上所述,最终采用了MAL25x175大气缸。


图大气缸MAL25X150 图双联式气缸
图10 两种气缸对比图
表5气缸性能对比
|
种类 |
活塞式气缸 |
双联式气缸 |
|
缸径 |
25mm |
16mm |
|
最大行程 |
800mm |
200mm |
|
温度范围 |
-20~70摄氏度 |
-5~70摄氏度 |
|
动作方式 |
双作用 |
固定式缓冲 |
|
压力 |
0.1~1.0Mpa |
1.0Mpa |
本次选用的大气缸MAL25x175是笔形气缸,此气缸位于小车货叉装置的叉臂上,主要用于障碍横杆的弹射。
与双轴气缸相比,具有结构紧凑,螺纹安装固定能有效节省安装空间的特点,还能够适应高频率的使用,以确保在赛场上时的可靠性和耐用性,且在具备实用性的同时还兼顾了外观,圆柱体形状的外观显得更加好看。
对比双轴气缸,其直径只有双轴气缸的一半,直接节省了一半的空间,且MAL25x175的最大行程和温度适应范围都优于双轴气缸,并且因为动作方式的不同,笔形气缸的弹射速度高于双轴气缸,综上所述,最终采用了MAL25x175大气缸。
本次采用的MAL25x1175格在笔形气缸中属于大规格,所具备的
作用力也完全能够将障碍横杆弹射出去。
根据气缸压力公式分析:
F1=Pxπ/4x^2D
F2=Pxπ/4x^2D^2d
其中:F1无活塞杆端的最大理论输出力(N)
P-公称压力(Mps)D-气缸径(mm)d-活塞杆直径(mm)
气缸的工作温度为-20~70摄氏度,不仅适合低温工作,并且在常温下能工作较长的时间。


 渝公网安备 50019002502335号
渝公网安备 50019002502335号