1. 功能要求
(1)机器人能够快速移动;
(2)实现稳定清障,将障碍杆迅速挑起并弹射出去。
2. 设计方案
机器人为实现将障碍杆迅速挑起并弹射出去的功能。主要拟采向上抓取转移,向下台起转移和挑起弹射。在虚拟模型试验后综合分析对比实现机构的结构复杂度、整体重量以及后续对控制系统复杂程度要求等因素后,最终选择了挑起弹射。
为尽量减少作动原件的数量,在设计时直接在挑起元件上安装了弹射装置,这样设计的目的是让挑起机构与弹射机构的动作更加连贯流畅。减少了失误的概率,设计简图如下图所示。
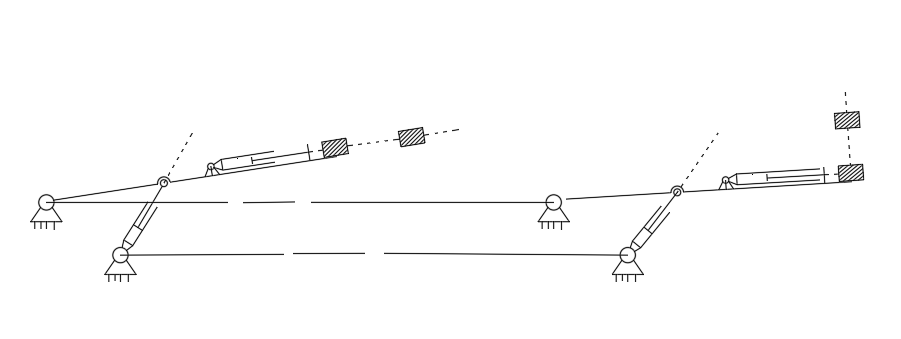
图1机构简图
挑起弹射的结构特点是,两个气缸的配合,在气缸带动挑杆抬起障碍杆的时候弹射装置就已经装备就绪将障碍杆弹射出去。能准确的做到无缝衔接。
最终确定的取物体抛射机器人的机构简图如下图2所示,主体是由两个气缸一根挑杆组成。抬升气缸将障碍杆抬升到适合的高度再由推出气缸将障碍杆迅速的推送出去。
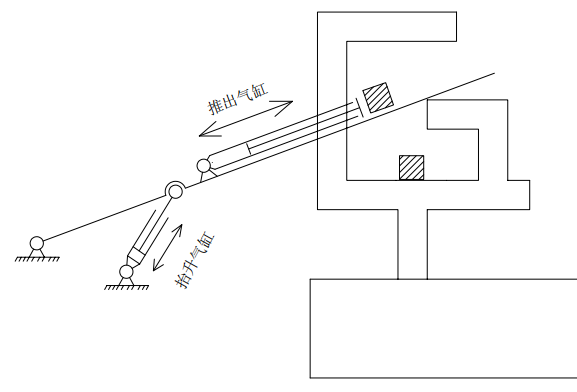
图2清障机器人机构简图
对拟设计应用的的机构原理图进行计算,确认其自由度等于原动件的数量,保证结构装置可动且运动唯一确定。
自由度是根据机械原理,机构具有确定运动时所必须给定的独立运动参数的数目,亦即为了使机构的位置得以确定,必须给定的独立的广义坐标的数目。
自由度计算公式:F=3n-2pl-2ph,n:活动构件数pl:低副数ph:高副数机构具有运动的条件:自由度=原动件数。机构运动离不开自由度,自由度又分为平面机构自由度和空间机构自由度。
P=3N-2PL-PH=3✖3-2✖4-2x0=1
由计算结果可知,拟设计使用的机构自由度数量为1,等于机构原动件的数量(由一个气缸驱动实现动作),机构是可以运动的,机构运动方式唯一。


 渝公网安备 50019002502335号
渝公网安备 50019002502335号