1.功能要求
在开始设计并制作机器人之前,我们首先需要明确所设计机器人应具备的主要功能,即设计需求。
(1)机器人能够实现快速灵活移动;
(2)具有清障机构,能够顺利清除图1所示横杆目标物体,目标物体放置于图1所示支架上,放置位置高度260毫米;
(3)机器人所有可动机构展开后最大尺寸不大于650*650*750mm。
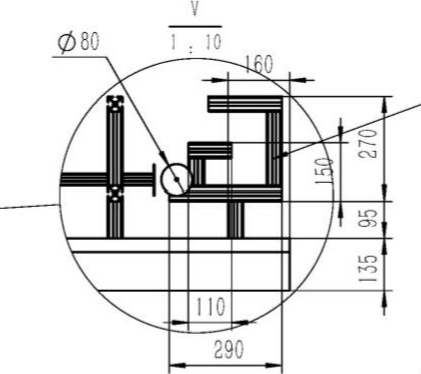
图1清除目标物体及所在支架
2.总体设计思路
根据设计需求进行分析得出几点设计思路
(1)为兼顾移动速度以及稳定性,拟设计移动底盘为轮式,采用四轮减速电机驱动;
(2)车轮的最大直径为100毫米,为成功清除目标物体,采取在机器人前端布置类似于货叉的机械装置;
首先需要设计清除障碍的横杆装置,为了应对G型障碍桩的阻碍,我们采取在清障机器人前端布置类似工程机械叉车前端货叉装置。此装置在将横杆挑起后会因横杆自重沿货叉下滑,而后由装备在货叉上的气动装置将横杆推出障碍桩。此装置巧妙的解决了G型障碍桩的限制,机械动作少,速度快。考虑到横杆自重,最终采取了小车货叉上左右两端各一个气缸装置,如此既增大了推杆力度又保证了被清除横杆的稳定与准确性。
经过各个关键工作机构的设计构思,结合控制系统实现机器人清障目的。
3.主要技术点
表1 机器人设计技术点
|
尺寸 |
460mm×363.91mm×429.22mm |
|
重量 |
10kg |
|
最大行驶速度 |
5.6 m/s |
|
最大延伸尺寸 |
460mm×363.91mm×625mm |
|
弹射气缸工作行程 |
150cm |
|
货叉气缸工作行程 |
50cm |
|
储气罐 |
2个 |
|
充填压力 |
0.6bar |
|
续航 |
3h |


 渝公网安备 50019002502335号
渝公网安备 50019002502335号