(四)折叠和夹取机构
1. 为什么要设计折叠机构?
折叠结构是一种用时展开、不用时可折叠收起的结构,场地中有一个将能量块放置到火箭顶端的发射仓内的加分任务,其中火箭发射仓高35cm,还有一个从长方形矿池中挖矿的任务,矿池内还有决明子填充围绕方形矿石,同时机器人高度被限定(长宽高:25cm*25cm*25cm),所以我们需要设计一个可以折叠的夹取机构。
2. 折叠机构
(1)两根长梁使用活动销首尾相连,再通过橡皮筋联动一个套筒,长梁一段连接机器人底盘,另一端连接夹取机构,折叠机构刚开始时处于折叠状态,如图1、 图2所示:
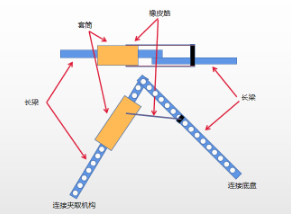
图1 折叠机构折叠状态

图2 折叠机构折叠状态实物图
当场地任务开始时,机器人控制电机转动将折叠机构展开展开瞬时状态如图3所示,最终展开状态如图4所示:
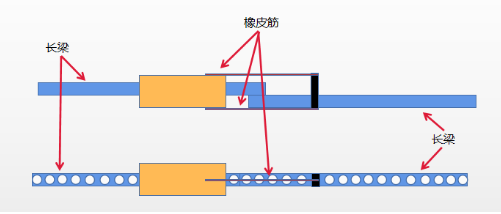
图3 折叠机构展开瞬时状态

图4 折叠机构展开完成状态
3. 夹取机构
(1)夹取机构两侧有两根弯梁,通过中间的轴带动两根连杆驱动弯梁开合从而夹取物品,如图5所示。
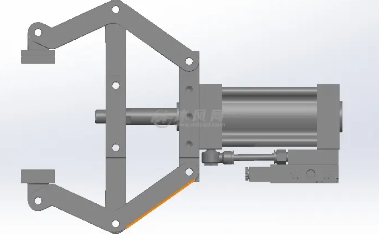
图5 夹取机构示意图
(2)夹取机构通过电机转动带动轴伸缩,再由轴带动两根连杆驱动弯梁开合从而夹取物品。由于电机转速过快,还需要利用减速装置减速,这里采用涡轮传动装置减速。
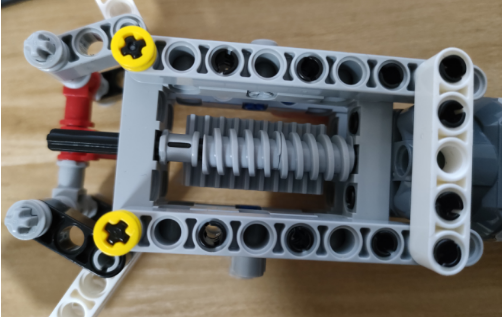
图6 减速装置
4. 折叠机构和夹取机构连接
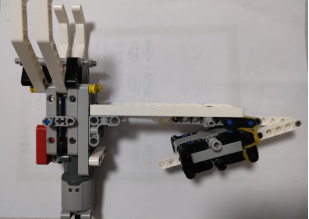
图7 连接侧视图
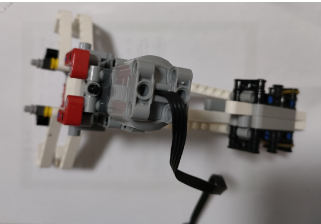
图8 连接俯视图
5. 机器人夹取机构组装
在组装夹取机构到车底盘时需注意电机转速过快、扭矩不足的问题,所以需要采用减速、增加扭矩的方式进行改进。通常用两种方法解决,一是用涡轮传动装置减速,由于我们没有涡轮箱,本次就没有采用,有涡轮箱的同学可以自行尝试使用涡轮传动装置带动夹取机构;第二种方式是使用齿轮减速,如果一级减速效果不佳,可采用二级减速(本次给大家展示的机器人也是使用到了二级减速装置进行减速)。
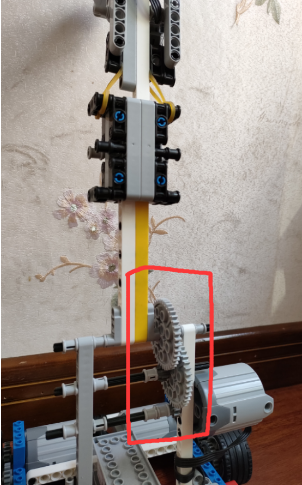
图9二级减速连接夹取机构
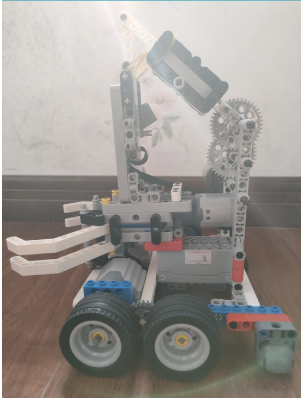
图10夹取机构折叠效果

图11夹取机构展开效果
友情提示:机器人的折叠机构在展开时可能会出现夹取机构太重导致机器人出现向前“翻车”的情况,所以在制作完成时应考虑在后轮处为机器人增加适当的配重!!!


 渝公网安备 50019002502335号
渝公网安备 50019002502335号